Kechun Xu
I am a final-year PhD (Sep. 2021 - ) student in Control Science and Engineering department at Zhejiang University . I belong to Robotics Lab, advised by Prof. Rong Xiong and Yue Wang . I was a visiting student at MSC Lab in Masayoshi Tomizuka . I also spent time in Alibaba Cloud and ZJ Humanoid as a research intern.
I obtained my B.Eng (Sep. 2017 - Jun. 2021) in Control Science and Engineering and Mechanical and Electronic Engineering from Zhejiang University with an honor degree at Chu Kochen Honor College.
My current research interests lie in robotic manipulation, robot learning, and embodied AI. My research goal is to develop human-level intelligence in robotic manipulation, including behavior dexterity, learning efficiency, and open-world generalization.
I am now open to potential academic and industry job opportunities. Please feel free to contact me!
Email /
Google Scholar /
Github /
Twitter /
LinkedIn
Photo taken by Zizhang Li .
Selected
All
APT: Action Expert Pretraining Improves Instruction Generalization of Vision-Language-Action Policies
Kechun Xu ,
Zhenjie Zhu ,
Anzhe Chen ,
Rong Xiong ,
Yue Wang
Under Review
Direction Matters: Learning Force Direction Enables Sim-to-Real Contact-Rich Manipulation
Yifei Yang ,
Anzhe Chen ,
Zhenjie Zhu ,
Kechun Xu ,
Yunxuan Mao ,
Yufei Wei ,
Lu Chen ,
Rong Xiong ,
Yue Wang
Under Review
Seeing to Act, Prompting to Specify: A Bayesian Factorization of Vision Language Action Policy
Kechun Xu ,
Zhenjie Zhu ,
Anzhe Chen ,
Shuqi Zhao ,
Qing Huang ,
Yifei Yang ,
Haojian Lu ,
Rong Xiong ,
Masayoshi Tomizuka ,
Yue Wang
Under Review
Toward Embodiment Equivariant Vision-Language-Action Policy
Anzhe Chen ,
Yifei Yang ,
Zhenjie Zhu ,
Kechun Xu ,
Zhongxiang Zhou ,
Rong Xiong ,
Yue Wang
IEEE International Conference on Robotics and Automation (ICRA 2026)
Efficient Alignment of Unconditioned Action Prior for Language-conditioned Pick and Place in Clutter
Kechun Xu ,
Xunlong Xia ,
Kaixuan Wang ,
Yifei Yang ,
Yunxuan Mao ,
Bing Deng ,
Jieping Ye ,
Rong Xiong ,
Yue Wang
IEEE Transactions on Automation Science and Engineering (T-ASE 2025)
Conference on Robot Learning (CoRL 2025), GenPriors Workshop
IEEE International Conference on Robotics and Automation (ICRA 2026)
UniMM: A Unified Mixture Model Framework for Multi-Agent Simulation
Longzhong Lin ,
Xuewu Lin ,
Kechun Xu ,
Haojian Lu ,
Lichao Huang ,
Rong Xiong ,
Yue Wang
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI 2026)
PolyFold: A Generalizable Framework for Language-Conditioned Bimanual Cloth Folding
Haozhe Du ,
Kechun Xu ,
Rong Xiong ,
Yue Wang
IEEE Transactions on Automation Science and Engineering (T-ASE 2026)
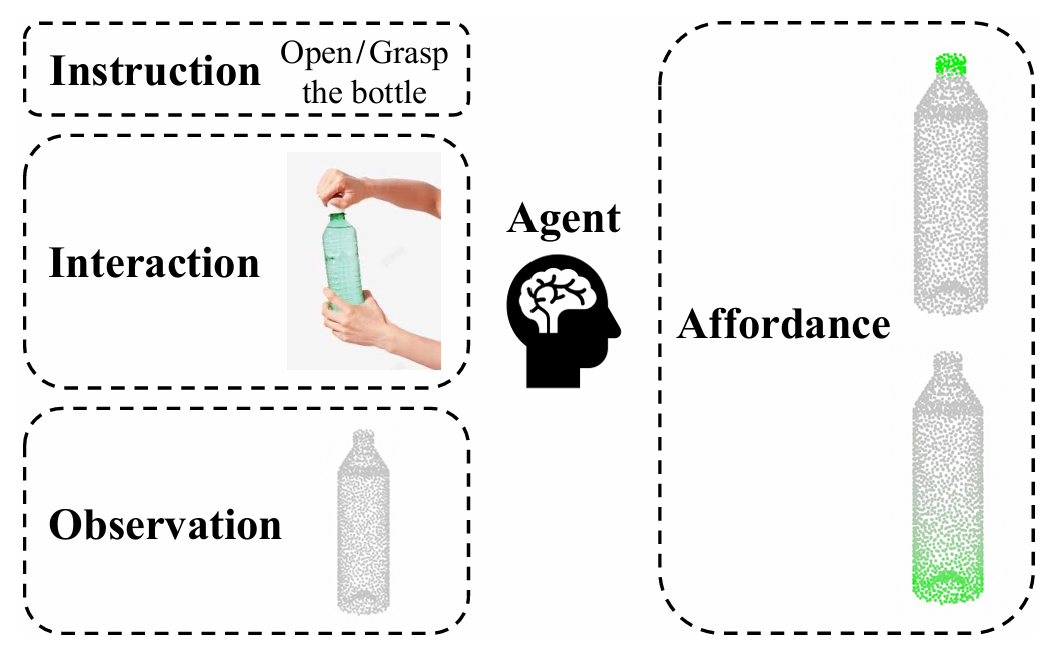
Grounding 3D Object Affordance with Language Instructions, Visual Observations and Interactions
He Zhu ,
Quyu Kong ,
Kechun Xu ,
Xunlong Xia ,
Bing Deng ,
Jieping Ye ,
Rong Xiong ,
Yue Wang
IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2025)
Grasp, See, and Place: Efficient Unknown Object Rearrangement with Policy Structure Prior
Kechun Xu ,
Zhongxiang Zhou ,
Jun Wu ,
Haojian Lu ,
Rong Xiong ,
Yue Wang
IEEE Transactions on Robotics (T-RO 2024)
IEEE International Conference on Robotics and Automation (ICRA 2025)
Adapting for Calibration Disturbances: A Neural Uncalibrated Visual Servoing Policy
Hongxiang Yu ,
Anzhe Chen ,
Kechun Xu ,
Dashun Guo ,
Yufei Wei ,
Zhongxiang Zhou ,
Xuebo Zhang ,
Yue Wang ,
Rong Xiong
IEEE International Conference on Robotics and Automation (ICRA 2024)
A Hyper-network Based End-to-end Visual Servoing with Arbitrary Desired Poses
Hongxiang Yu ,
Anzhe Chen ,
Kechun Xu ,
Zhongxiang Zhou ,
Wei Jing ,
Yue Wang ,
Rong Xiong
IEEE Robotics and Automation Letter (RA-L 2023)
IEEE International Conference on Robotics and Automation (ICRA 2024)
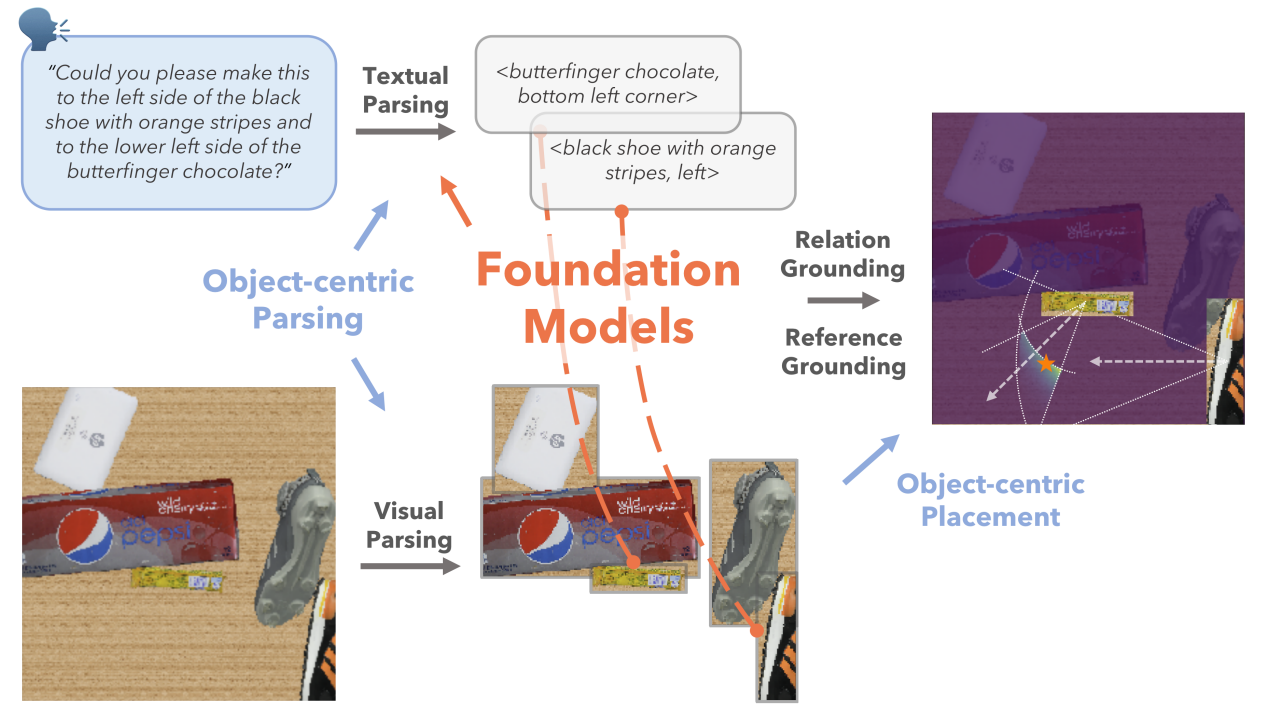
Object-centric Inference for Language Conditioned Placement: A Foundation Model based Approach
Zhixuan Xu ,
Kechun Xu ,
Yue Wang ,
Rong Xiong
IEEE International Conference on Advanced Robotics and Mechatronics (ICARM 2023)
A Joint Modeling of Vision-Language-Action for Target-oriented Grasping in Clutter
Kechun Xu ,
Shuqi Zhao ,
Zhongxiang Zhou ,
Zizhang Li ,
Huaijin Pi ,
Yifeng Zhu ,
Yue Wang ,
Rong Xiong
IEEE International Conference on Robotics and Automation (ICRA 2023)
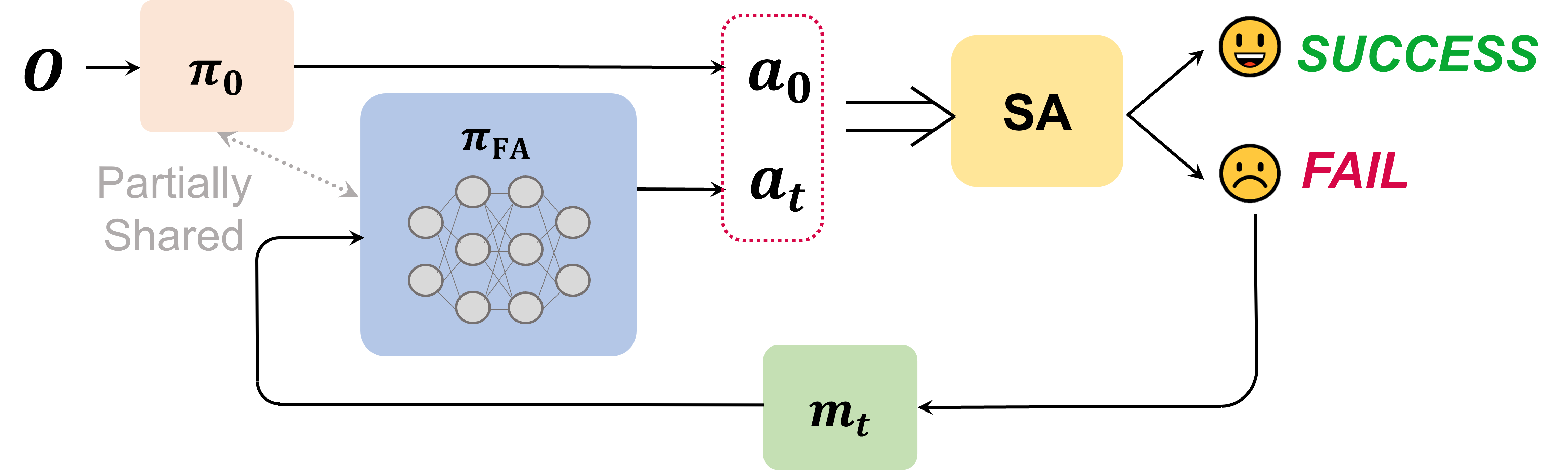
Failure-aware Policy Learning for Self-assessable Robotics Tasks
Kechun Xu ,
Runjian Chen ,
Shuqi Zhao ,
Zizhang Li ,
Hongxiang Yu ,
Ci Chen ,
Yue Wang ,
Rong Xiong
IEEE International Conference on Robotics and Automation (ICRA 2023)
Learning A Simulation-based Visual Policy for Real-world Peg In Unseen Holes
Liang Xie ,
Hongxiang Yu ,
Kechun Xu ,
Tong Yang ,
Minhang Wang ,
Haojian Lu ,
Rong Xiong ,
Yue Wang
Review of Scientific Instruments (RSI 2023)
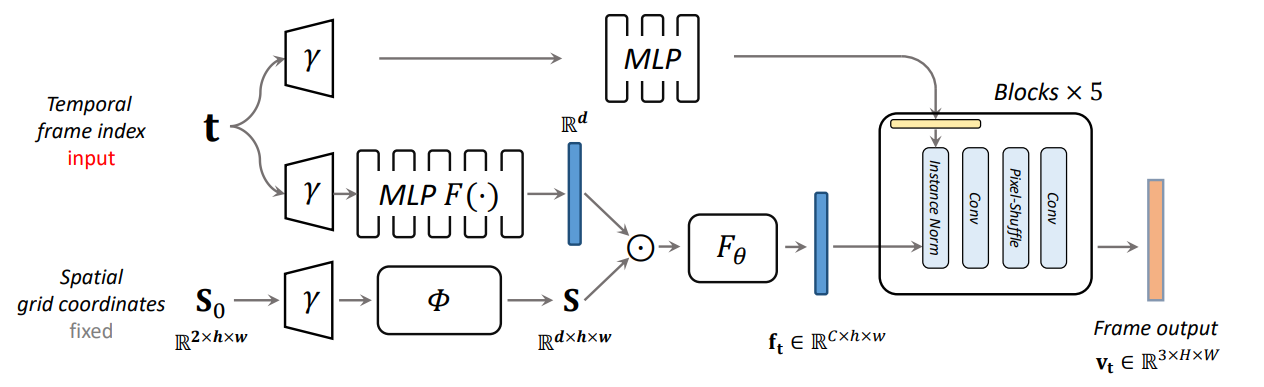
E-NeRV: Expedite Neural Video Representation with Disentangled Spatial-Temporal Context
Zizhang Li ,
Mengmeng Wang ,
Huaijin Pi ,
Kechun Xu ,
Jianbiao Mei ,
Yong Liu
European Conference on Computer Vision (ECCV 2022)
Efficient Object Manipulation to an Arbitrary Goal Pose: Learning-based Anytime Prioritized Planning
Kechun Xu ,
Hongxiang Yu ,
Renlang Huang ,
Dashun Guo ,
Yue Wang ,
Rong Xiong
IEEE International Conference on Robotics and Automation (ICRA 2022)
Neural Motion Prediction for In-flight Uneven Object Catching
Hongxiang Yu ,
Dashun Guo ,
Huan Yin ,
Anzhe Chen ,
Kechun Xu ,
Yue Wang ,
Rong Xiong
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021)
Reviewer of T-RO , T-MECH , T-ASE , RA-L , T-CDS , RSS , CoRL , ICRA , IROS , Humanoids .
Executive Committee Member of ARTS 2025.
Selected Honors and Awards